One of the most challenging crossings in the Norwegian Public Roads Administration’s E39 coastal highway project is the 5km-wide Bjørnafjord south of Bergen, where water depths are up to 550m (Bd&e issue no 81). The E39 highway covers a distance of almost 1,100km along the west coast from Kristiansand in the south to Trondheim in the north with eight ferry connections along the route. The NPRA aims to make this highway ferry-free, reducing travel time by up to nine hours.
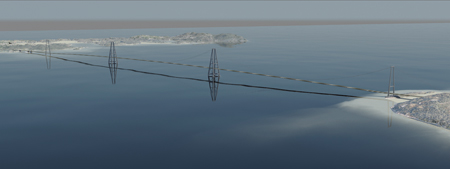
The proposed bridge has two tension leg floats and two bottom-fixed traditional towers (Courtesy NPRA)
Several bridge concepts have been suggested for the Bjørnafjord crossing, including a multi-span suspension bridge supported by tension leg platforms. One of the main issues with long floating bridges is the dynamic response caused by wind and wave loading. This response can be predicted in the time domain using newly-developed functionality in RM Bridge software developed by Bentley Systems Austria in collaboration with Norwegian engineering firm TDA Cowi.
The tension-leg platform bridge concept consists of a three-span suspension bridge supported by two tension leg floats moored mid-fjord and two near-shore, bottom-fixed traditional concrete towers. The three main spans of the bridge each have a length of 1,385m, while the water depth is 550m at one float and 450m at the other.
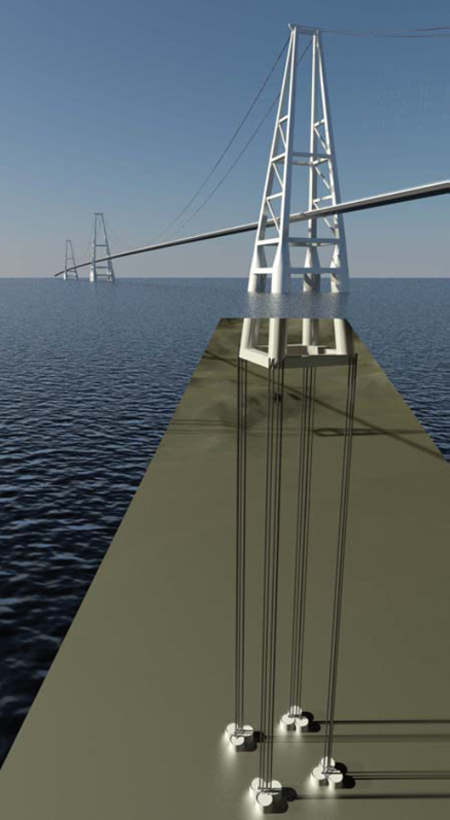
The TLP-concept is rigid in the vertical plane and flexible in the horizontal, making it well suited for suspension bridges (Courtesy NPRA)
The tension leg platform concept is used by the offshore industry to provide a stable working platform at great water depths with the legs providing high stiffness in the vertical direction as well as in the rotation of the two horizontal axes, and horizontal stiffness provided by the total tension in the tendons. This means that the desired stiffness can be obtained by tuning the buoyancy and the weight of the structure. In addition, the superstructure provides significant stiffness in both horizontal directions.
The geometric stiffness of the superstructure for lateral motion is provided by the tension in the suspension cables. The stiffness of the two floats as well as the geometric stiffness of the superstructure play an important role in the bridge’s dynamic behaviour.
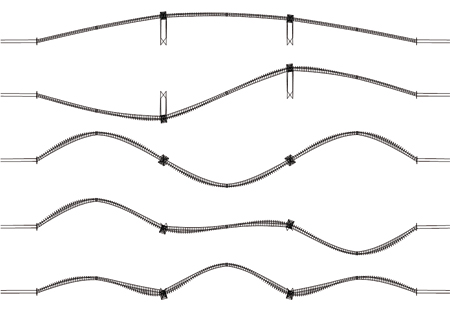
The first five lateral eigenmodes of the bridge
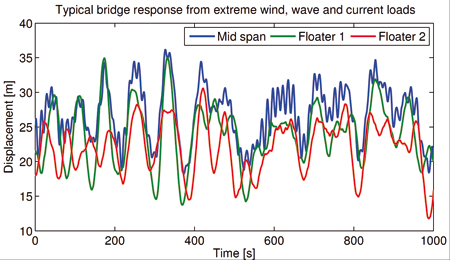
The bridge is laterally flexible, with deflections from extreme wind loads exceeding 30m. The long natural periods of the bridge, around 80 seconds for the first mode, mean that wave loading is mainly counteracted by inertial forces. However, the bridge also has several eigenperiods from four to 20 seconds where there is significant wave energy, which gives rise to a wave-induced resonant motion in the superstructure.
In order to predict the bridge response from wind and wave loading with sufficient accuracy, non-linear, time-domain analysis is needed. This is due to the non-linearity in the structural system and the coupling between wind and wave loading, which are challenging to model correctly in the frequency domain.
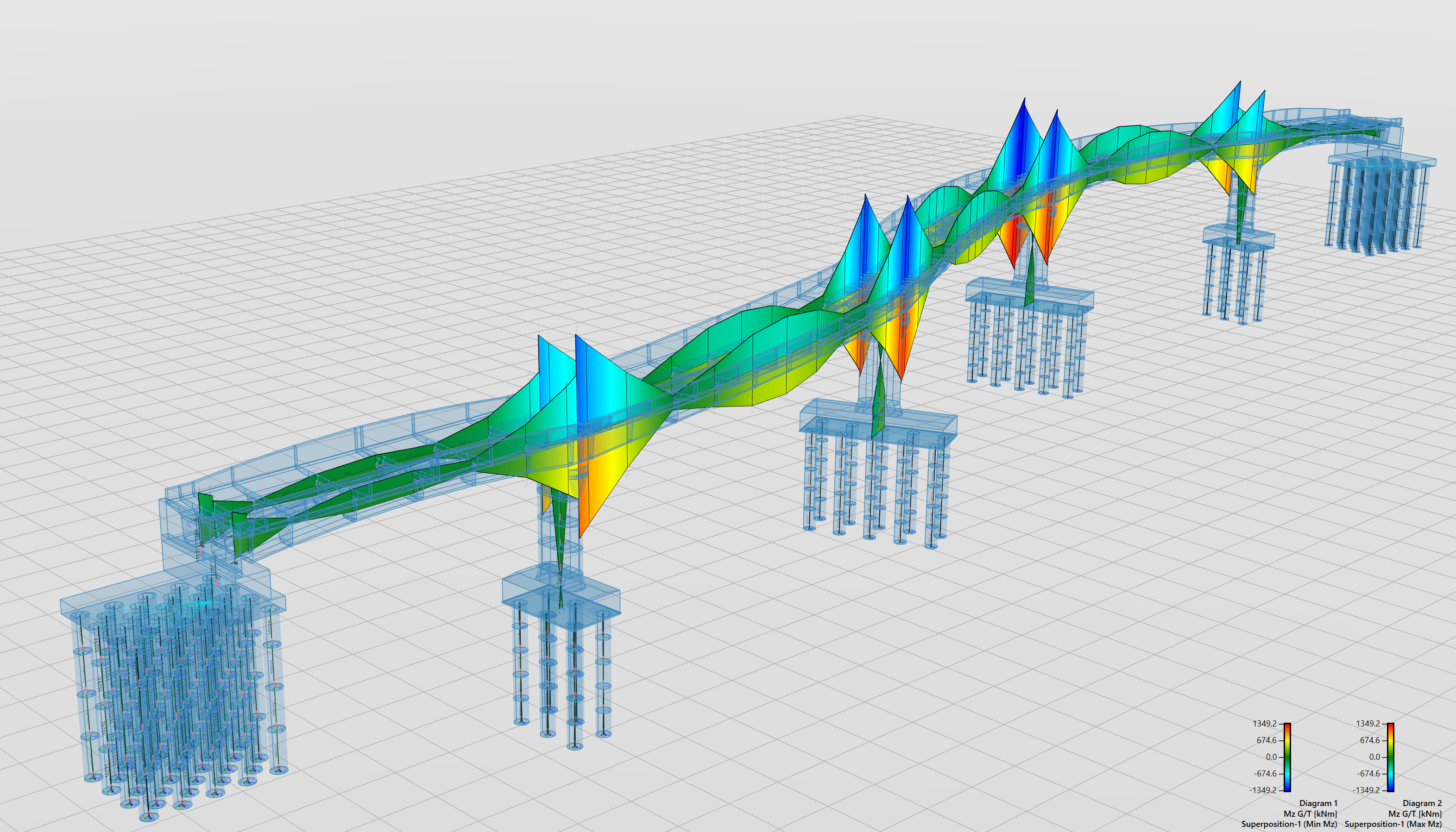
A time-domain analysis model of the bridge has been developed in RM Bridge that includes both the hydrostatic and hydrodynamic properties of the floats. The towers and superstructure, including bridge girder, cable system and hangers, are modelled as structural elements. The submerged parts of the floats are modelled as rigid bodies connected to the seabed by cable elements representing the tendons. The rigid body assumption is necessary for including hydrodynamic properties as point properties, and is sufficient for global response analysis as well as analysis of the superstructure and tendons.
The hydrostatic buoyancy force is modelled as a structurally fixed, vertical force applied in the centre of buoyancy. This ensures that the destabilising moment of the buoyancy force for rotations about the horizontal axes is included in the model. The hydrostatic restoring forces due to change in displaced volume are modelled as linear springs.
The hydrodynamic loads on the float include excitation forces from incoming waves, radiation forces when the float moves through water, and viscous forces due to relative motion between float and current.
The radiation forces, also known as hydrodynamic-added mass and damping, are inertial forces and damping forces due to fluid-structure interaction. The frequency-dependent added mass and damping coefficients are calculated by third party hydrodynamic software such as Ansysaqwa. In time domain the radiation forces are obtained by the convolution of the float motion-history and impulse-response functions representing the fluid-structure interaction. The IRFs are constructed from the frequency-dependent damping coefficients prior to simulation.
The hydrostatic mass of the float and the hydrodynamic behaviour of the structure had to be embedded in the existing time-history analysis procedure for solving the non-linear equation of motion in time domain of RM Bridge, which uses the well-known Newmark algorithm. A new ‘hydrodynamic spring’ element has been introduced to manage the data transfer and calculation tasks. The properties of this special element describe the hydrodynamic stiffness as well as time-dependent additional masses and damping behaviour. Hydrodynamic mass and damping are defined as additional properties in these hydrodynamic spring elements.
Hydrodynamic viscous drag is calculated from the relative velocity between current and structure, such that viscous damping is included. A new load type has been implemented in RM Bridge for this purpose, allowing the user to input the current velocity as a function of depth.
According to hydrodynamic theory, the excitation loads caused by incoming waves can be assumed to be independent of the structural motion. This allows the modelling of wave loading as force-time histories calculated prior to simulation. Force-time histories in all six degrees of freedom for each float are calculated using transfer functions providing the relation between wave loads and surface elevation. The incoming waves are modelled as a stochastic process from wave spectra representative of the Bjørnafjord’s basin.
Wind loads are modelled in a similar manner using wind-speed time histories as input. The turbulent wind speeds were generated from the Ochi and Shin wind spectrum, which is based on offshore wind-speed measurements. The spectrum is believed to be a realistic representation of the wind conditions at the bridge site. More importantly, the spectrum has more energy than typical onshore spectra at the lowest natural frequencies of the bridge. The use of land-based spectra would result in a non-conservative estimate of the low-frequency motion response of the bridge.
A simplified description of the wind field was used, with limited spatial variation of the wind gusts. While this is sufficient for concept development and for gaining understanding of the bridge behaviour, it is overly conservative for design purposes. New aerodynamic functionality in time domain is currently being implemented in RM Bridge and will be ready for use in the near future. The main advance is a full description of the wind field covering the whole bridge, using Monte Carlo simulation to generate spatially coherent turbulent wind speeds. New aerodynamic load formulation in time domain, based on quasi-static theory, will also be included in the new software package. This will allow accurate prediction of the buffeting response without requiring any assumptions of linearity.
The added inertia due to the floats moving through water has a large impact on the eigenmodes of the bridge. Eigenmode analysis with hydrodynamic added mass is an iterative process in which the frequency-dependent, added-mass matrix is updated until the added mass frequencies correspond with the respective eigenfrequencies. Convergence was achieved after a few iterations for all eigenmodes. The present study focuses on the first five lateral modes with eigenperiods ranging from 13s to 81s.
The 100-year return period environmental conditions were considered and, for simplicity, all environmental loads such as wind, wave and current were modelled acting in the same direction transversally to the bridge. The mean wind speed at the height of the bridge girder is approximately 36m/s, with a turbulence intensity of 12.5%. The sea state consists of both locally wind-generated waves and ocean swell. The wind-generated waves have a significant wave height of 3.3m, and a peak period of 5.6s. The swell has a significant wave height of only 0.4m, and a peak period of 16s. The current has a surface speed of 0.7m/s and drops rapidly with depth.
Analyses were performed in time domain with coupled aerodynamic and hydrodynamic loading as well as just hydrodynamic loading. The wind load dominates the global displacements, with static response orders of magnitude larger than the hydrodynamic loading. However, the wave loading causes local motion of the spans due to the resonant excitation of the floats. The response power spectra show that the superstructure motion is mainly in mode three and four, indicating that swell waves yield higher response levels than local wind-generated waves despite significantly smaller wave height. This is due to the periodic nature of swell excitation where the energy is concentrated in a very narrow frequency band.
The results obtained in this study show the importance of coupled aerodynamic and hydrodynamic analyses of floating bridge concepts. Many of the load effects and responses considered in this project would not be possible to analyse in frequency domain.
The hydrodynamic load effects have now been successfully implemented in time domain in RM Bridge and buffeting analyses in time domain are currently being implemented in collaboration with TDA. With this in place, RM Bridge will offer a complete package for analyses of suspension bridges in time domain, with all the important structural, functional and environmental load effects included n
Mitja Papinutti is a bridge engineer at Bentley Systems Austria, Mathias Marley is a marine engineer and Arne Bruer is a senior structural engineer at TDA Cowi.