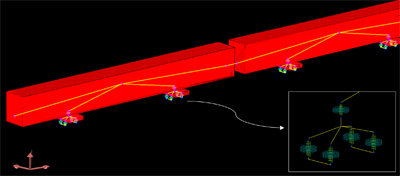
The train is modelled as a sequence of cars, each a multi-body system created from rigid bodies, springs and dashpots. The train is shown graphically in Larsa 4D
In the bridge engineering industry, academic research can drive the use of new construction methods, components, and materials, accelerating the translation of that research into new products that address modern challenges. A collaboration which began two decades ago is still bearing fruit today with the development of new technologies to support the delivery of high-speed rail bridge design.
A relationship between the University at of Buffalo’s Multidisciplinary Center for Earthquake Engineering Research and Larsa was established 20 years ago when professors Michael Constantinou and Andrei Reinhorn formed a collaboration that would benefit both academia and the specialist engineering sector.
Early efforts of that relationship were integrated into Larsa 4D’s inelastic and seismic element library; today the collaboration has evolved to support the delivery of state-of-the-art rail projects.
At high speeds, such as the 400km/h proposed for the new California high-speed rail project, resonance and coupling of the vehicle with the natural frequencies of the structure exacerbate structural demands. To quantify these design considerations, initial phases of the collaborative efforts resulted in the implementation of a new vehicle-track-structure-interaction analysis. First iterations were limited to two-dimensional vehicle, track, and linear elements, but proved that they were necessary for the design of high-speed rail structures. The latest version enables three-dimensional implementation of vehicle-track-structure-interaction analysis on curved high-speed bridge spans.
Traditionally railway bridges are designed based on static analyses with static loads multiplied by a dynamic magnification factor to account for the effect of train loads. However, Eurocode EN1991-2 clearly states that such a design approach is unable to predict the resonance effect from high-speed trains. Therefore, dynamic analysis with time-varying loading is required for many bridges supporting trains travelling at speeds of 200km/h and upwards.
High-speed rail has many operational restrictions that affect planning and design, including the requirement for tracks that are predominantly straight with shallow curves and without sudden changes in elevation. These restrictions explain the fact that, for example, about half the total length of high-speed railway lines in China consists of bridges and aerial structures, while in Spain some viaducts reach up to 3km in length.
According to the Eurocode, such analysis should be performed either using a high-speed load model, which consists of a series of moving vertical loads and represents an envelope for dynamic effects of multiple real trains, or by solving the train equations of motion simultaneously. The latter approach requires vehicle-track-structure-interaction analysis. Use of a high-speed load model is convenient in terms of designing a structure for a range of possible train types. This is especially important considering the requirements of interoperability in Europe, where high-speed trains travel across borders and need to be compatible with all the tracks and structures they use. At the same time, however, the validity of high-speed load modelling is limited, depending on the train weight and geometry. Another consideration for bridge design for high-speed trains is that for curved tracks, centrifugal forces must be included in the analysis, which complicates the use of high-speed and similar moving load models. Therefore, derivations of new load models may be necessary for those trains with non-standard geometric or mechanical parameters.
The USA has similar requirements for the design of high-speed rail bridges. According to the California High-Speed Train Project documentation, vehicle-track-structure-interaction analysis is required for final design if the structure does not meet the requirements of a simplified analysis, with train effects represented as moving loads. In this case, a dynamic train model must be built and must include the masses of wheelsets, bogies, and car bodies, as well as stiffness and damping of the suspension systems. Taking into account these considerations, Larsa is developing a VTSI analysis engine capable of performing dynamic analysis of high-speed rail bridges including interaction with train models.
Mathematically, vehicle-track-structure-interaction can be represented as a system of three sets of equations of motion — for the train, track, and bridge subsystems — coupled with one another. VTSI analysis calculates displacements, velocities and accelerations at various locations on both the bridge and the train, as well as contact forces between the wheels and the rails. These can then be checked to ensure compliance with design requirements. For example, vertical deck accelerations must be limited to guarantee traffic safety and avoid destabilisation of the ballast; passenger comfort is checked based on car body accelerations, and the track safety is verified based on the time-varying contact forces.
There are three main types of algorithms for solving such a mathematical model. The first type seeks to solve the three sets monolithically using specialised VTSI software. This approach cannot be easily implemented in existing structural analysis software since separate vehicle and bridge models have to be combined together. The second type solves the three sets of equations separately, relying on iterative procedures. While this approach is convenient, it might require significant computational resources since the convergence of the solution can be slow. The third type of VTSI analysis, which is implemented in Larsa 4D, is based on complementing the system of equations of motion with constraint conditions. This approach solves the equations of motion of the vehicle and bridge in separate modules and communicates the forces and motion at the interface between them. This leverages the bridge analysis capabilities of Larsa 4D in the VTSI context.
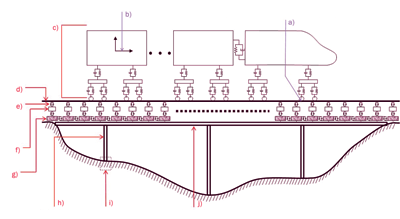
A) Kinematic constraints representing connection of train to rail; Lagrange multipliers are contact forces; inequality constraints to represent contact and separation; Hertzian/Kalkar contact models.
B) Car co-rotational frame — geometric non-linearity due to track curvature is accounted for by large displacements and rotations of, but small rotations within, this frame.
C) Train modelled by assembly of rigid bodies, and (possibly non-linear) springs and dashpots.
D) Rail — beam elements.
E) Rail pad — non-linear spring/dashpot elements.
F) Sleeper — rigid body or beam elements.
G) Ballast — non-linear spring/dashpot elements with additional mass.
H) Columns — beam elements.
I) Soil spring elements if necessary.
J) Deck — beam elements (possibly with box sections, plate girders etc), plate elements.
The bridge is modelled using standard structural or finite elements, such as beam and plate elements, box girders, cables; in fact any of the elements available in Larsa 4D. The train is modelled as a sequence of cars. Each car is represented as a multi-body system composed of rigid bodies, springs and dashpots. The train and the track are coupled together by means of kinematic constraints. In order to provide higher continuity in the interpolation of these constraints, non-uniform rational B-splines or ‘nurbs’ are used to construct the time-dependent influence matrix which corresponds to the positions of wheels on the rail. The rail is modelled as a 3D beam using an isogeometric approach, which employs the same interpolation functions, or nurbs, for both geometry and displacements. Such an approach offers two advantages. First, higher order continuity is achieved at the inter-element boundaries. This allows for a smooth transition when a wheel travels from one discrete rail element to the next. Second, in the case of a curved track, the longitudinal geometry of the track can be represented exactly; a curve generated by computer-aided design software can be included in the model to represent a rail.
The system of constrained equations of motion to be solved requires careful consideration of the time-integration scheme. As available research suggests, some amount of numerical damping is necessary to avoid spurious high-frequency numerical oscillations in the contact forces — Lagrange multipliers. Therefore, the generalised-α method is employed to discretise equations of motion in time. This scheme provides accuracy at low frequency and the desired numerical damping at high frequency.
The crucial advantage of the algorithmic approach that was selected is its capability to incorporate into the analysis any bridge structure that can be modelled in Larsa 4D and any train based on Larsa’s train template library. The library allows a user to specify geometric and mechanical parameters of the various wheels, bogies and car bodies used on the train. In a case where the type required is not in the library, a new type can be implemented on request from a user.
As high-speed rail systems expand around the world, a range of analysis and design alternatives are being developed. The vehicle-track-structure-interaction engine described above provides a convenient and universal platform for railway bridge analysis.
Maria Fedorova is a PhD student and Mettupalayam Sivaselvan is associate professor, Department of Civil, Structural & Environmental Engineering at the University at Buffalo; Joshua Tauberer is senior technologist at Larsa



